

- 更新时间:2024-05-27 08:39
所属行业:机械 仪器仪表 驱动装置 -
发货地址:上海青浦
信息编号:296568510,公司编号:14194598
产品规格:不限
产品数量:10000.00 个
包装说明:不限
产品单价:面议
官方网址:http://a2794852653.cn.b2b168.com/
- 13636607932 陶念源
- 留言数:8人
- 查看数:5人
agv驱动舵轮 广西AGV小车驱动集成厂
- 相关产品:
AGV驱动舵轮
- 所在区域:上海青浦盈浦
- 经营性质:合资经营企业(港或澳、台资)
- 企业类型:生产加工
- 注册地:上海
- 主营产品:分割器厂家,凸轮分割器厂家
- 企业已认证
- 个人实名已认证
- 产品分类
- 商家其他产品推荐
- 产品详细信息
差动轮AGV
优点:差动轮AGV通过两轮的差动来实现转向,转向时的半径,速度,角速度,都由两个差动轮来确定。可以实现原地打转等动作,有比较强的灵活性。差动轮AGV对电机和控制精度要求不高,因而成本低廉。
缺点:差动轮AGV运行精度较低,无法适应对精度要求高的场合。
AGV主要的导引方式:电磁感应导引,光带导引,激光导引引,视觉导引,超声波导引,GPS导引等。AGV的运载方式可以根据需求进行定制,并没有固定的形式,因而灵活多变。但按照大类区分,主要可以分为以下几类:背驮式,潜伏式,叉车式等等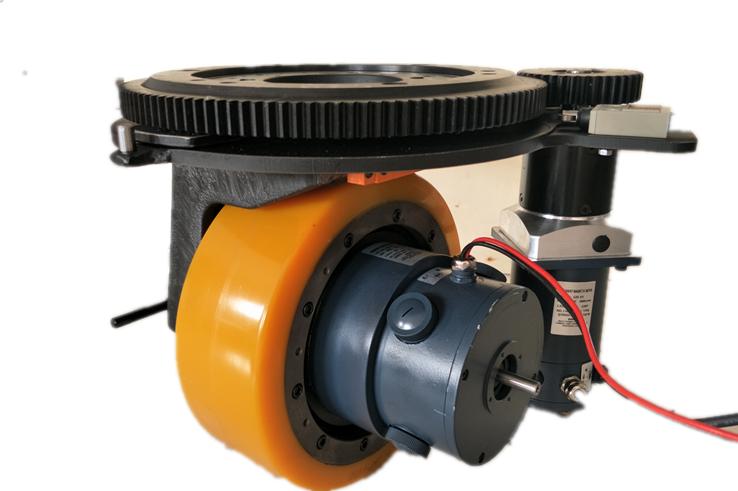
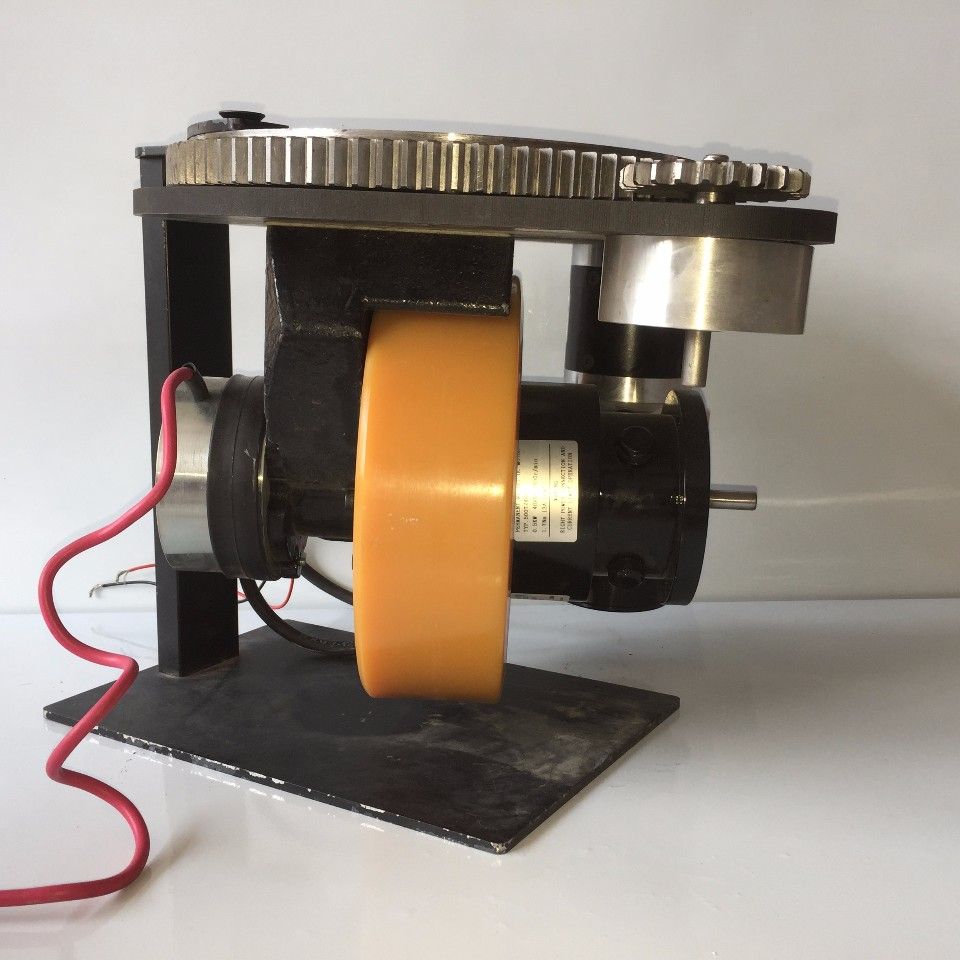
舵轮的轮子使用聚氨酯包胶轮,相比传统A V小车差速控制方式,舵轮集成化高,适配性强,配合控制器和低压伺服驱动器,可快速部署AGV、移动式机器人行走和转向。在AGV小车轮中,舵轮价格相对较高
agv小车指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源,一般可通过电脑来控制其行进路线以及行为。
agv小车底部通过驱动轮控制agv小车的移动,现有的agv小车驱动轮通过螺栓与agv小车底板进行锁固,但未对驱动轮的平行效果进行保证,容易导致前后两侧的驱动轮产生平行偏差,影响agv小车驱动轮的驱动轨迹。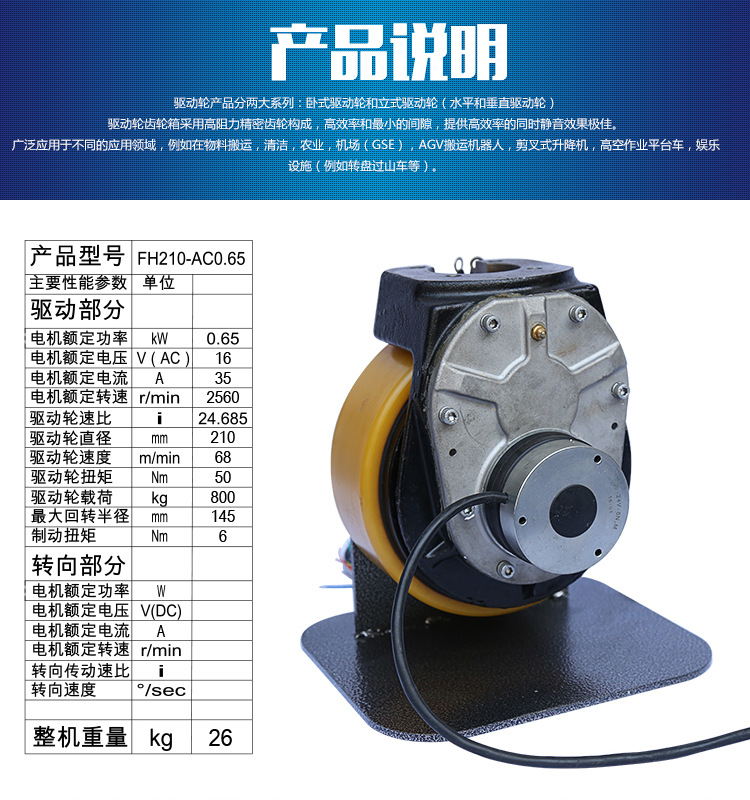
AGV属于轮式移动机器人,按照移动特性又可将移动机器人分为两种: 非移动机器人和移动机器人。物体在平面上的移动可产生前后,左右和自转3个自由度的运动。若所具有的自由度少于3个则为非移动机器人;若具有完全的3个自由度,则称为移动机器人。
- 商家联系方式
- 我要给商家留言
- 商家产品推荐










- 相关产品推荐
-
健康管理师教学设备_**气的_合作
内蒙古食品安全体系认证 赤峰HACCP认证 需要那些条件
机器人减速机 河源谐波减速机厂商
昭通智能生理心理健康检测系统厂家 个体化
agv双轮差速驱动 江苏AGV小车驱动轮型号
太原二手导热油锅炉回收 量大量小均可 快速响应
agv减速电机 沈阳AGV小车从动轮批发
滁州500碘蜂窝活性炭 用途和特点
曲靖防爆型风压差检测报警器 安装简便
新型生物发酵复合碳源 生物菌种 耐低温
龙岩不锈钢螺丝 供应 支持定制
古交美丽乡村项目可研报告代编
湖南蜂窝状活性炭 品种多样
常州石英砂垫层 品种多样
漳州脉冲式滤简除尘器厂家 滤筒除尘器生产厂家 适用范围广
长沙MIRA规格 具有高度的准确性和可重复性
体育赛事计时计分及成绩处理系统 可以适用于多种比赛
BAP2A08-T0,高压齿轮泵
广电 奉节2024年教师招聘条件
克拉玛依无负压设备厂家 可靠性强
西门子VAF41.150-360 具有较高的可靠性 电压调节