北京果之核科技有限公司
- 所在区域:北京海淀
- 经营性质:
- 企业类型:
- 注册地:
- 主营产品:服务机器人设计,产品设计,工业设计公司,机械设计制作,模型结构设计,巡检机器人设计
- 注册资金:
- 企业已认证
- 个人实名未认证
- 商家相关产品推荐:
- “教学机器人设计 机器人产品设计公司 产品设计”详细信息
| 产品规格: | 不限 | 产品数量: | 9999.00 个 |
|---|---|---|---|
| 包装说明: | 不限 | 价格说明: | 不限 |
| 查看人数: | 20 人 | 本页链接: | https://info.b2b168.com/s168-295215490.html |
| 公司编号: | 23133783 | 更新时间: | 2024-04-19 09:54:17 |
| 服务地区: | 全国 | 服务: | 一站式全面解决方案 |
| 设计周期: | 1-3个月 | 设计领域: | 工业设计、机械设计 |
| 产品质量: | 优质 |
人们与服务机器人的交互与人们和普通机器的交互仍有区别,例如有用户会在机器人身后叫它,或者在使用完后,会和机器人说“谢谢”或“再见”。
工业设备的外观设计必须与其功能相匹配。外观设计应该考虑到设备的使用环境、使用频率、使用者的习惯等因素,以便更好地满足用户的需求。例如,如果工业设备需要经常清洁或维修,那么外观设计应该考虑到易于拆卸和组装的要求。
机器人视觉导航技术与传统机器人技术相比,具有更强的性和智能性,能够让机器人在未知环境中自主移动导航,能够执行复杂的任务,以期达到实现智能制造的目的。
按照机器人设计的基本要求来确定机器人的类型,无论是行走改进机械臂,还是三轴座标机器人及其六轴机器人,在确定机器人类型后,也确定其控制模式,同时在有限的空间内,设计指导方向。
确定机器人设计的任务。这是机器人设计中更复杂的内容,在实现这个复杂的过程中,也必须分为几个小步骤,先是设计要求明确要求,然后根据设计要求制作机械传动图,然后分析图,后制定动作流程表,确定传动效率、控制方法和步骤。
机器人的设计需要符合人机工程学原理。人机工程学是以人为中心的设计原则,旨在设计出符合人体工学和心理学原理的机器人,以提高人机交互效果和操作体验。
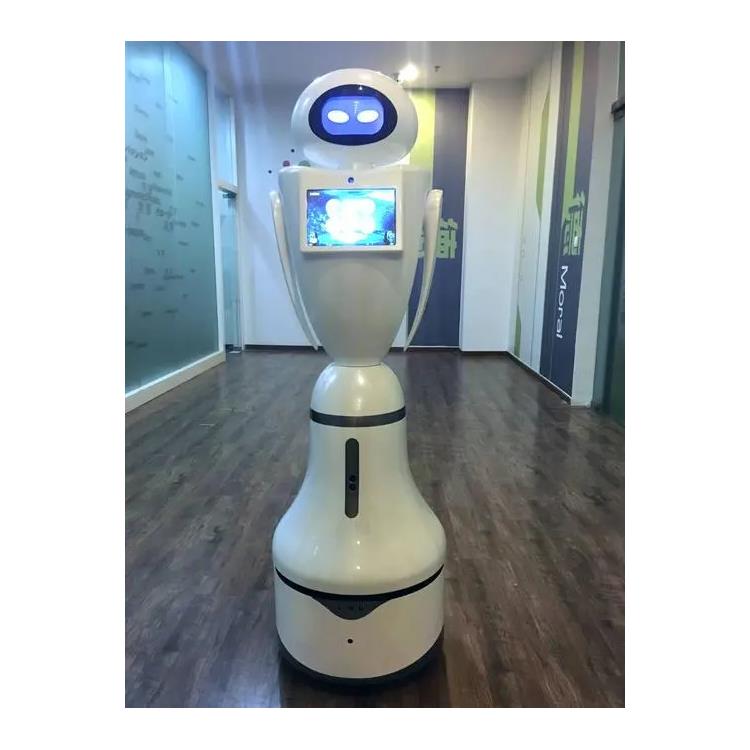
在研究前期,我们收集和总结了目前常见的三种屏幕设计形式,即双屏、一体屏、头部单屏,并通过Rhino 建模制作了三种不同屏幕形态相应的机器人:款有明显的“头部”设计,且头部和身体上均具有显示屏;*二款为一体屏设计;*三款也有明显“头部”,但仅在头部具有显示屏。
主要经营北京果之核科技有限公司-致力于赋能中小企业,为客户提供产品设计,模型结构设计、智能机器人,科技展陈的企业,公司为客户提供产品设计,制造,组装等技术服务,为客户提供0-1的产品解决方案,电话:18201554410。
单位注册资金未知。
- 我要给商家留言
- 商家联系方式
- 商家为您推荐
- 商家更多产品推荐
-
太原网易云黑胶音乐会员月卡-福禄聚采商城
广西垃圾管道运输厂家 宁夏悬挂式垃圾通道 包安装
黄江镇事故车回收政策 可申请所有手续
自贡 有创呼吸机出租 配备制氧机
嘉兴预制直埋保温管 泡沫保温管 优良品质
欧州加工中心进口报关公司|广州代理二手机器进口清关公司
大邑废旧物资回收公司 回收物资公司
酒泉预制硬质聚氨酯瓦壳 耐高温聚氨酯泡沫管壳 施工便捷
大量回收木质颗粒活性炭 吸附速度快
陕西直埋预制保温管厂家 聚氨酯保温管
连南瑶族自治县报废铲车回收流程 即时付款
网络版广告机回收公司 免费上门取货
DF200BA80 整流桥 中国区代理
苏州哈氏合金B-2 B-3 G-30 X 性价比高 结实耐用
道教送子娘娘佛像 寺庙佛像厂家 沈阳送子娘娘佛像
橡胶EPDM进口关税与费用-代理进口报关报检服务公司
通化直埋预制保温管厂家 耐高温保温管
东莞大朗速冻冷库回收-收购制冷设备欢迎来电咨询
增城区新能源汽车回收补贴 即时付款
常德B1级聚苯板复合石膏板厂家 安装方便
油墨抗乳化剂 油溶性好 不易溶于水 克服因乳化引起的浮脏 起油腻