

- 2024-05-24 09:17 180
- 起订量:1 价格:300
- 发货地址:广东深圳 包装说明:不限
- 产品数量:99999.00 个产品规格:不限
- 信息编号:273006074公司编号:17862914
- 杨和权 副总经理 微信 13715272677
- 进入店铺 在线留言 QQ咨询 在线询价
体验智能导航 车载GPS定位带你轻松穿梭
- 相关产品:
gps
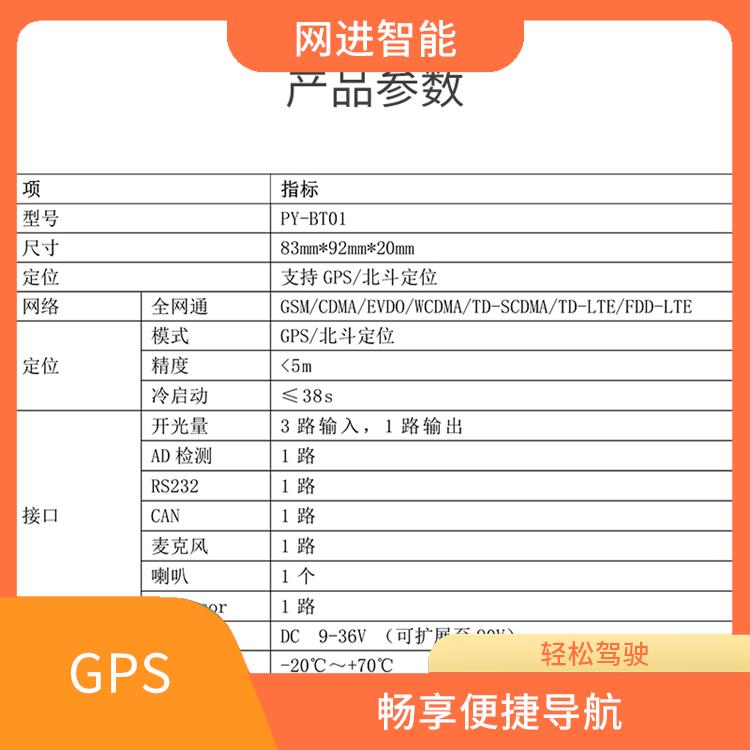
GPS定位电话
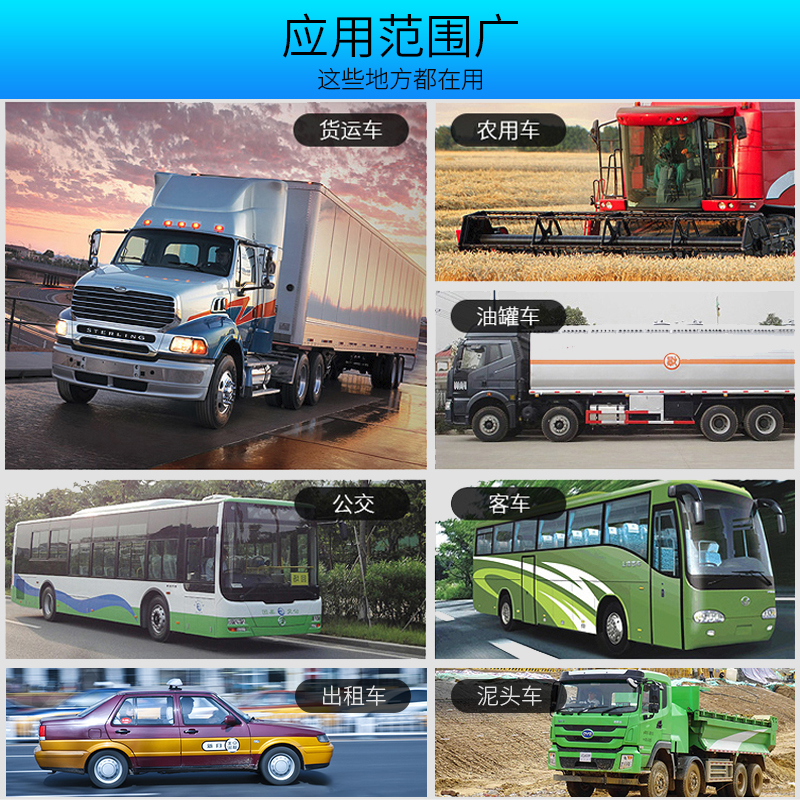
GPS定位系统应用在交通管理方面,可以将道路网上的车辆实时位置、运行轨迹准确地反映在控制中心的电子地图上,犹如给道路交通管理者增添了一双千里眼,实时监视着道路网上的车辆流向、流量、流速、密度、路网负荷程度等各种交通信息。GPS系统与城市交通信号控制系统、交通地理信息系统、交通情报信息系统相连接可以进行实时的交通信号控制,交通诱导和交通流组织优化,从而达到充分利用路网、缩短车辆旅行时间、降低行车延误、减少车辆空驶、**行车安全、提高道路通行能力的目的。GPS系统还可以用于执行紧急任务的车辆定位、指挥、调度、救援和管理。
GPS定位功能:
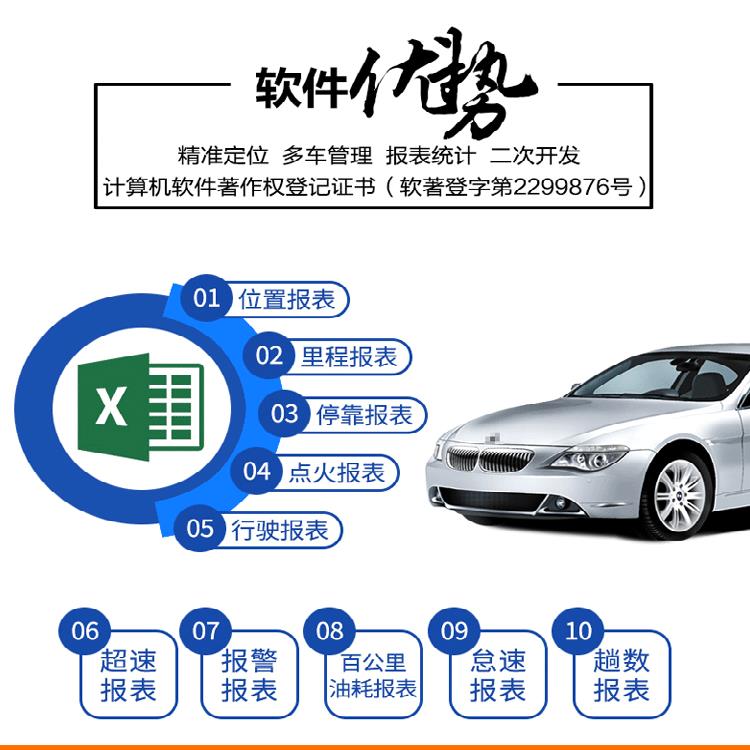
1、跟踪定位:中心能全天侯所有被控车辆的实时位置、行驶方向、行驶速度,以便及时的掌握车辆的状况。
2、轨迹回放:中心能随时回放近60天内的自定义时段车辆历史行程、轨迹记录。(根据情况,可选配轨迹DVD刻录服务)
3、报警(报告)。
4、地图制作功能:根据查看需要,客户可以添加修改自定义地图线路,以更好服务企业运行。
5、统计:系统利用GPS车载终端的行驶记录功能和GIS地理系统原理对车辆进行行驶里程统计,并可生成报表且可打印。
6、车辆信息管理:方便易用的管理平台,提供了车辆、驾驶人员、车辆图片等信息的设定,以方便调度人员的工作。
7、短信通知功能:将被控车辆的各种报警或状态信息在必要时发送到管理者手机上,以便随时随地掌握车辆重要状态信息。
8、车辆远程控制:中心可随时对车辆进行远程断油断电,锁车功能。
9、车载电话:车载电话可以象普通手机一样拔打电话,调度中心可对此电话进行远程权限设置,即呼入限制、呼出限制、只能呼叫的若干。
10、油耗检测:实时车辆的油耗变化,并生成历史时段油量变化报表或油量曲线图,进而直观反映出油量的正常消耗与非正常消耗及加油数量不足等现象,达到油耗高水平管理,杜绝不良事件的发生。(需搭配油量传感器)
11、车辆调度:调度人员确定调度车辆或者在地图上画定调度范围,GPS系统自动向车辆或者画定范围内的所有车辆发出调度命令,被调度车辆及时回应调度中心,以确定调度命令的执行情况。GPS系统还可对每辆车成功调度次数进行月统计。

GPS定位影响因素:
1、美国*部SA卫星信号干扰。(卫星信号受美国控制,偶尔有可能会中断信号服务) 。
2、天气因素。如:太阳黑子、恶劣天气(降低讯号强度,但不影响定位) 。
3、电气电磁干扰;遮蔽物下(建筑物里,山谷、峡谷、隧道) 。
4、汽车挡风玻璃上的隔热膜、隔热纸、金属成份遮蔽等。(降低讯号强度,但不影响定位) 时间显示不正常 GPS上的日期时间是用来显示卫星时间的,GPS收到卫星信号才显示正常,没信号时不正常,它不是常用的电子表,不能调整不能保存。 GPS定位原理 卫星定位系统共有24颗人造卫星分布在工作6个轨道上运转,每个轨道间互成120度角,使得GPS使用者在任何时间、地点都可接收到卫星信号加以定位。且不受天气的影响(受地形或建筑物遮蔽影响,也就是在室内或公交车上较难收到卫星信号。
GPS定位方法:GPS定位的方法是多种多样的,用户可以根据不同的用途采用不同的定位方法。GPS定位方法可依据不同的分类标准,作如下划分:
1、观测值:伪距定位。
伪距定位所采用的观测值为GPS伪距观测值,所采用的伪距观测值既可以是C/A码伪距,也可以是P码伪距。伪距定位的优点是数据处理简单,对定位条件的要求低,不存在整周模糊度的问题,可以非常容易地实现实时定位;其缺点是观测值精度低,C/A 码伪距观测值的精度一般为3米,而P码伪距观测值的精度一般也在30个厘米左右,从而导致定位成果精度低,另外,若采用精度较高的P码伪距观测值,还存在AS的问题。
2、载波相位定位:载波相位定位所采用的观测值为GPS的载波相位观测值,即L1、L2或它们的某种线性组合。载波相位定位的优点是观测值的精度高,一般优于2个毫米;其缺点是数据处理过程复杂,存在整周模糊度的问题。
3、定位模式:定位。
定位又称为单点定位,这是一种采用一台接收机进行定位的模式,它所确定的是接收机天线的坐标。这种定位模式的特点是作业方式简单,可以单机作业。定位一般用于导航和精度要求不高的应用中。
4、相对定位:相对定位又称为差分定位,这种定位模式采用两台以上的接收机,同时对一组相同的卫星进行观测,以确定接收机天线间的相互位置关系。
5、时间:实时定位。
实时定位是根据接收机观测到的数据,实时地解算出接收机天线所在的位置。
6、非实时定位:非实时定位又称后处理定位,它是通过对接收机接收到的数据进行后处理以进行定位得方法。
7、运动状态:动态定位。
所谓动态定位,就是在进行GPS定位时,认为接收机的天线在整个观测过程中的位置是变化的。也就是说,在数据处理时,将接收机天线的位置作为一个随时间的改变而改变的量。动态定位又分为Kinematic和Dynamic两类。
8、静态定位:所谓静态定位,就是在进行GPS定位时,认为接收机的天线在整个观测过程中的位置是保持不变的。也就是说,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量。在测量中,静态定位一般用于高精度的测量定位,其具体观测模式多台接收机在不同的测站上进行静止同步观测,时间由几分钟、几小时甚至数十小时不等。

我们公司一如既往,精益求精,不断进取,不断完善,保证我们的品质和信誉。欢迎您随时光临、咨询、洽谈业务。








{kind=link}