
焊接机器人如何实现纳米级的运动?
机器人能否实现以100nm为单位的运动?难以想象,考虑到人类的头发厚度是其700倍而已。Nanosystec的一款焊接机器人证明上述运动是可能的,它的是来自于背后线性运动hepcomotion的支持。
高精密定位 :机器人能实现100nm级的运动
在设备的是一个可调整的载重板,能使激光二管和光纤互相精密匹配,因为光纤10nm的直径和激光二管准确的射中在的目标,这就产生了100纳米级的运动。通过对比:1nm的铁块就是或多或少等同于一排4个原子的长度。换句话说,人类头发丝是100nm的700倍厚。
一旦匹配好了,两个激光焊接头就会开始固定光纤包裹在金属衬套中,并在两侧焊接密封住。这里的起到了决定性的作用。“NanoWeld概念的挑战之一就是识别一个控制系统。。。。。”Nanosystec技术总监Gunter Hummelt说到,“为了节省空间来建造一个复杂的装置,我们不想通过X-Y系统来工作,而是弧形导轨”
Hepco系统控制的激光运动
Hummelt求助于线性运动hepcomotion 和它的PRT2环形导轨和节段。此系统包含的钢材和多样的直径的环形和节段,也能与直线导轨合并成开环和闭环的导轨。Nanoweld系统用了4个环形导轨:2pcs宽度为44的90度弧形节段在载重板的上方,另外两个宽度76mm的90度弧形节段在底部。“这些导轨强度非常好和非常”,Hummelt说到,“这给了我们很大的竞争优势,它能降低系统的维护成本”。
Nanosytec为此导轨系统开发了一个特殊的满足激光运动的小车。这里PRT2的另一个部件被排上用场—V型导轨技术,小车上的轴承分为同心和偏心的。这些轮子接触淬火的上面和下面,这能保证V型导轨非常。“导轨是研磨过的,小车滚轮的预载能通过偏心轴承实现精密调整”,hepcomotion的顾问工程师Carl-Christian Baumgarten道。运动是通过hepco小齿轮接触齿的外部然后传递小车上电机的力到导轨上提供的。“这能满足激光焊接头从垂直方向折向下到70度。”Hummelt解释道。也为了满足水平方向的定位,根据客户要求,工程师能在一个宽的小车上组装这个系统,它能在被安装在底部的76mm宽的节段上运动。即使经过很长的时间,也能实现精密运动,只需要保持润滑即可。
控制系统确保有害的焊接变形减小到少程度
Nanoweld达到了优的精度:可再生的定位角度精度小于100nm。Hummelt道“如果用户想每天焊接不同的部件,这个设备能调整焊接角度精度到 0.1°”,他也解释为什么部件的功能在其他方面会受到损害。“一旦开始焊接,一个小的温度为1600度的融化焊接池就形成了,如果凝结的话,就有焊接变形的风险,这会导致激光二管和光纤定位失效”。只有优的焊接角度才能保证变形量是在可接受的范围内。Hepcomotion系统的优势在于焊接角度能通过机动小车进行调整。导轨自身也能运送焊
接头而额外的机械支撑。Hummelt说道“对我们而言,hepcomotion系统是划算和的解决方案来实现激光的环形导轨运动系统,其他的都被证明太大,太复杂或太贵。
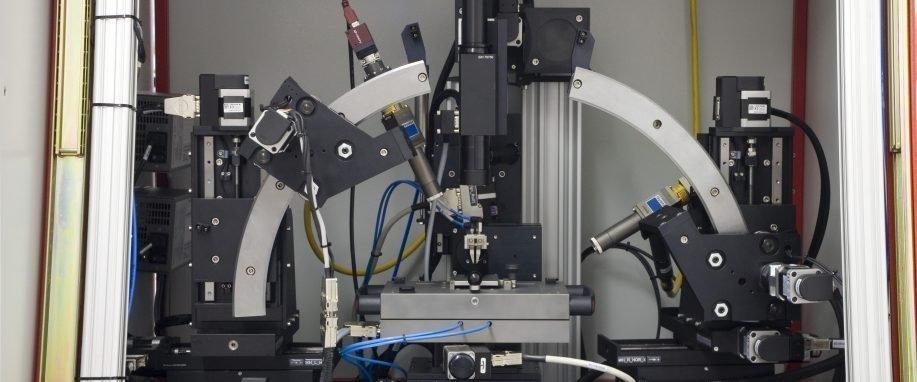
高精密激光焊接:Nanoweld焊接机器人焊接10um直径的光纤。激光运动精度为100nm内。
小车上偏心滚轮的预载能在nm级的定位精度下进行调整。
Hepcomotion钢材环形节段非常坚固。
广州权硕机电设备有限公司专注于V型导轨,弧形导轨,环形导轨,圆弧导轨,环形轨道,V型滚轮,圆弧轨道,圆形导轨,弧形轨道,弧形滑轨,齿条导轨,磁悬浮导轨,环形滑轨,滚轮轴承,海普克,HepcoMotion等